ROS Communication Patterns
ROS provides different patterns that can be used to communicate between ROS Nodes:
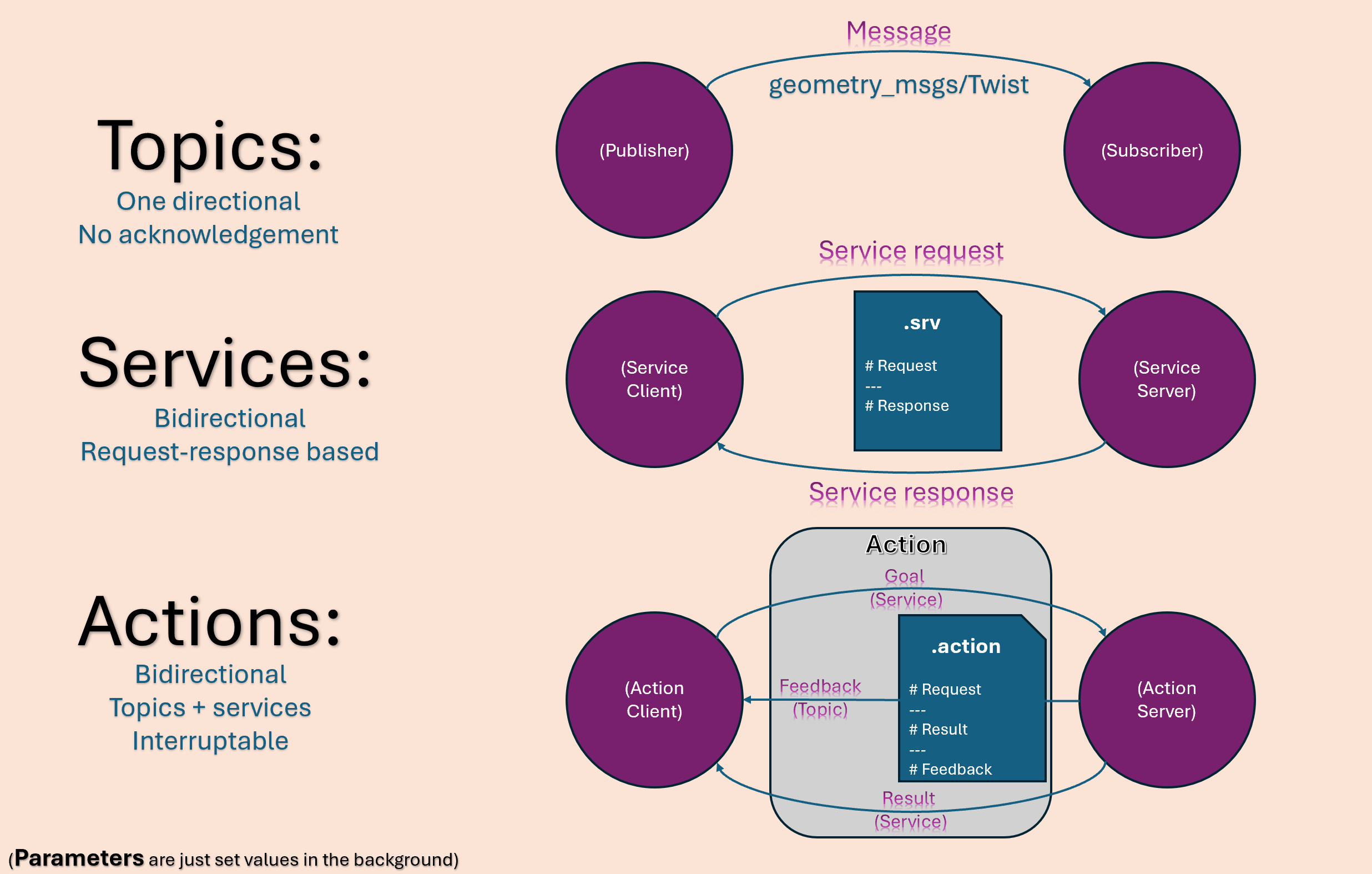
- Topics: are used to send continuous data streams like e.g. sensor data. Data can be published on the topic independent of if there are any subscribers listening. Similarly, Nodes can also subscribe to topics independent of if a publisher exists. Topics allow for many to many connections, meaning that multiple nodes can publish and/or subscribe to the same topic. The official tutorial on how to implement a simple publisher/subscriber can be found here. How too create a custom message type can be found here.
- Services: are used when it is important that a message is received by the recipient and a response on the outcome is wanted. Services should only be used for short procedure calls e. g. changing the state of a system, inverse kinematics calculations or triggering a process. The official tutorial on how to implement a simple service server/client can be found here. How to create a custom action can be found here.
- Actions: are similar as services but are used if the triggered event needs more time and the possibility for receiving updates on the process or being able to cancel the process is wanted. An example could be when sending a navigation command. The official tutorial on how to implement an action server/client can be found here. An example which allows the client to cancel the goal can be found here: server, client. How to create a custom action can be found here
- Parameters: are not actually a communication pattern but rather is a storage space for variables. It is not designed for high-performance and therefore mostly used for static variables like configuration parameters. The official guide on how to use parameters in a class can be found here.