UR Basics
Theme
- Waypoints.
- Motion – MoveJ og MoveL.
- End-effector – using the gripper.
- Pick and place.
Equipment
- UR5e-series robot with PolyScope.
- Robotiq 2-Finger Adaptive Robot Gripper / Hand-E Gripper
- Lab station with two boxes, two cups and a gripable object.
Before the lab
1.Very important: Complete the Universal Robots Academy
2.Get in touch with the lab engineer Raquel (raquel.motzfeldt.tirach@hvl.no) for a good follow up.
3.Try to get together in a group of 2-4 people.
4.Travel to Campus Verftet!
5.Read and sign the lab rules.
6.Have fun! If you are stuck don’t hesitate to ask for help 🌈
Report
There is no need to hand in a report after this lab. Signed attendance will suffice as approved lab exercise.
Tasks
1. Repeat Universal Robots Academy Task 4. Creating a program, but this time on a real robot:
- Make a triangle using MoveJ, then using MoveL, and finally using MoveP.
- Pick up a box with the robot, then place it somewhere else.
2. Repeat Universal Robots Academy Task 10. You may find it in the PROTrack section of the Universal Robots Academy - not in the Core section. The task is named feature coordinates. This time you will compute the task on a real robot and you decide the real/imaginary box.
Race pace
Finally! A challenge. 🤖🔧
A series of requirements are listed below, make a program to fulfill them all!
Make the movements as fast and as smooth as possible! Without endangering the robot or the humans!
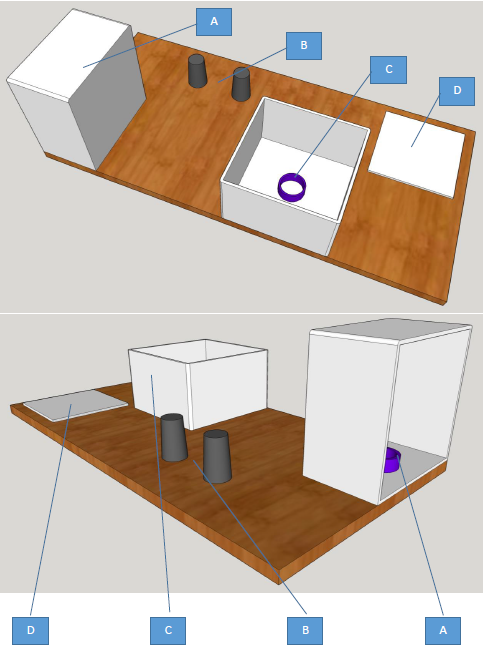
- Build the course in the picture below.
- Place the object in box C.
- Make the start position for the robot straight up, pointing to the sky.
- Pick up the object
- Move between the two cups B, not over!
- Place object in box A
Questions
- What is this thing UR calls "Feature"?
- Which ones did you use?
- Where were their respective origins?
- What is their use?
- What is MoveJ, MoveL and MoveP? Describe the difference, and when to use what.
- What was your fastest race time?