Bug2
In this assignment you will create a controller which uses the Bug2 algorithm for navigating a Turtlebot to a target destination. The goal of this exercise is for you to be able to implement a navigation algorithm and learn to use the different communication patterns available in ROS. In the last assignment you have created a wall-follower and a go-to-point algorithm. In this assignment you will reuse them and connect them to implement the bug2 algorithm. You will also have to use all 3 of the available communciation patterns in ROS2.
Bug2 Algorithm
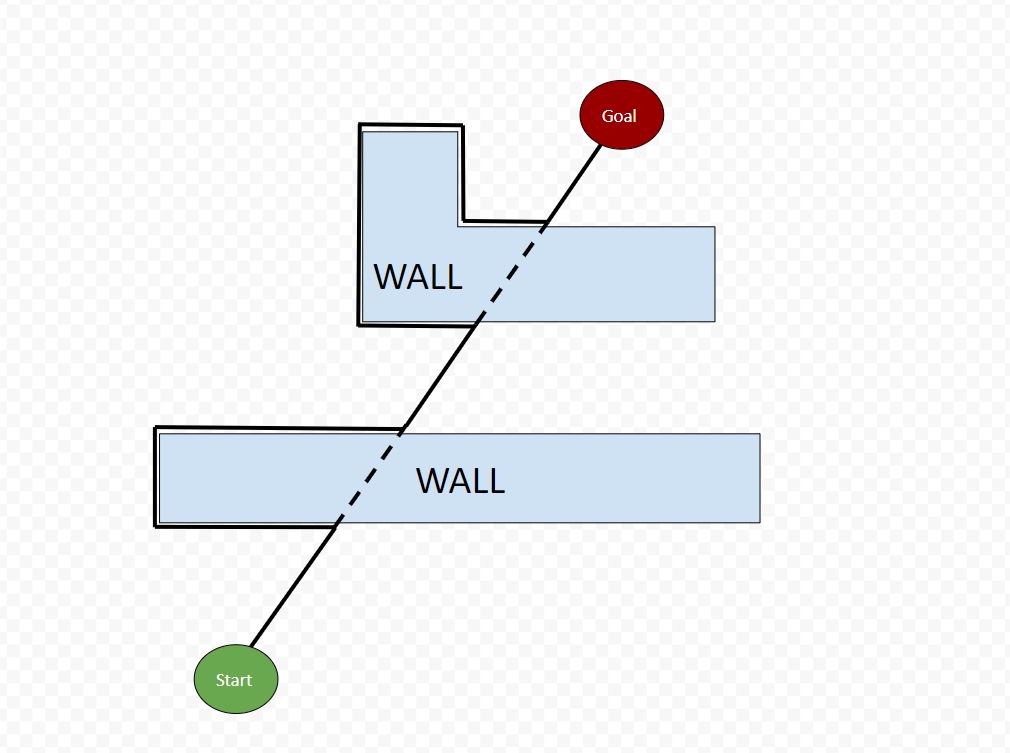
The bug2 algorithm requires a known starting and goal position. It will start by computing a line between the start and the goal positions and then basically operates in 2 modes:
- In default the robot will try to use the go-to-point algorithm to get to the goal as quickly as possible. If the robot encounters an obstacle it will switch into wall-following and remember at what point it left the intially computed line.
- It will follow the wall until it hits a point on the line that is closer to the goal then when the robot left the line. At which point the robot changes back into go-to-point.
Assignment Requirements
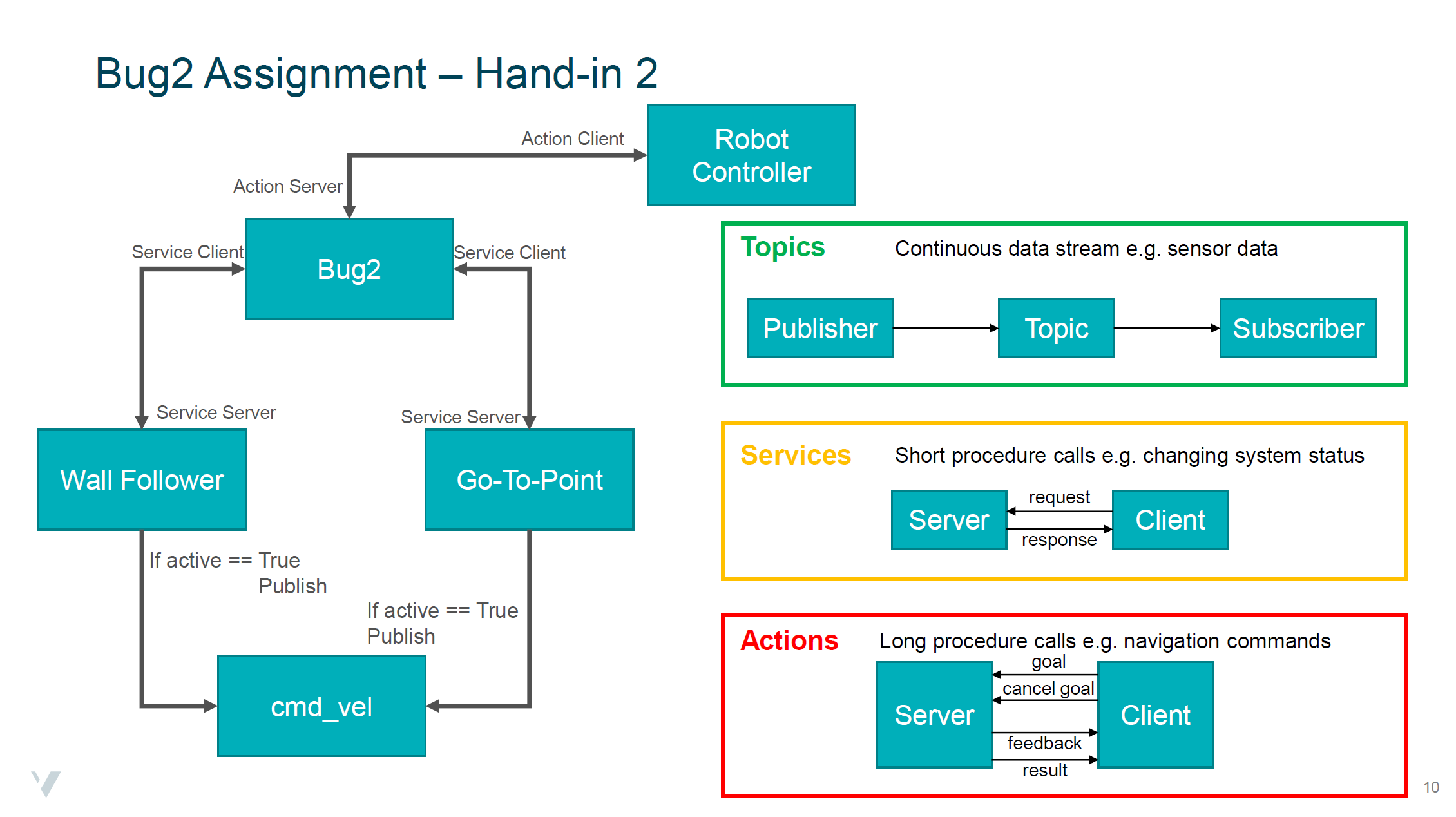
- Create a ROS2 package for your custom messages called bug2_interfaces
- Create a service server in both the wall-follower and the go-to-point controller.
- For the wall-follower service use the std_srvs/SetBool message structure.
- For the go-to-point service create a custom service message in the previously created bug2_interfaces package with the following structure:
bool move_switch geometry_msgs/Point target_position --- bool success - Create the bug2 controller script in which you write the algorithm that decides when either the go-to-point or the wall follower script is supposed to control the robot.
- In the bug2 controller script create two ROS2 service clients that connect to the servers from wall follower and go-to-point.
- Optional:
- Create a ROS2 action server in the bug2 controller script.
- Create a custom action message in the bug2_interfaces package with the following structure:
#goal definition geometry_msgs/Point target_position --- #result definition geometry_msgs/Point base_position --- #feedback definition geometry_msgs/Point current_position - Create a robot controller script that has an action client connected to the bug2 action server and sends the navigation goal position to that action server.