Launch
Launch files are very common in ROS. They provide a convenient way to start up multiple nodes, as well as other initialization requirements such as setting parameters.
There are a few ways to create launch files in ROS2; Python Launch Files, XML Launch Files, Composable Launch Files, Launch Configuration Files, Launch Configuration Files, etc. We will only learn how to create** Python launch files**.
Create a launch file
- Open a terminal: Ctrl+Alt+T
- Change directory to your package:
cd ~/ros2_ws/src/my_package - Create a launch folder:
mkdir launch - Go to the newly creatged launch folder:
cd launch - Create a launch file in it:
touch my_launch.launch.py
Your directory should look like this:
Now copy the code below and go through line-by-line.
/my_package/launch/my_launch.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
hello_pub = Node(
package="my_package",
executable="my_publisher", # We defined in the setup.py
name="my_publisher_from_node" # new name of the node if you want
)
hello_sub = Node(
package="my_package",
executable="my_subscriber",
name="my_subscriber_from_node"
)
return LaunchDescription([hello_pub, hello_sub])
Preparing the setup.py
We need to tell the ROS that we have a new executable. It is a bit different than introducing a node as executable (as we did in the previous tutorial). Here, we include the whole /launch folder.
- Add the necessary imports
setuptoolsandglob. - Expand the data_files[] such that you add this line:
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))),
/my_package/setup.py
from setuptools import setup
import os ## Add-1
from glob import glob ## Add-2
package_name = 'my_package'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))), ## Add-3
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='gizem',
maintainer_email='gizem@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'my_package = my_package.my_package:main',
'my_publisher = my_package.my_publisher:main',
'my_subscriber = my_package.my_subscriber:main'
],
},
)
Done. Compile and source.
Run the launch file
The command to run a launch file is very similar to running a node: ros2 launch my_package my_launch.launch.py
Now you can observe that two hello world nodes from the previous tutorial are running. (Hint: use either ros2 node list or ros2 run rqt_graph rqt_graph)
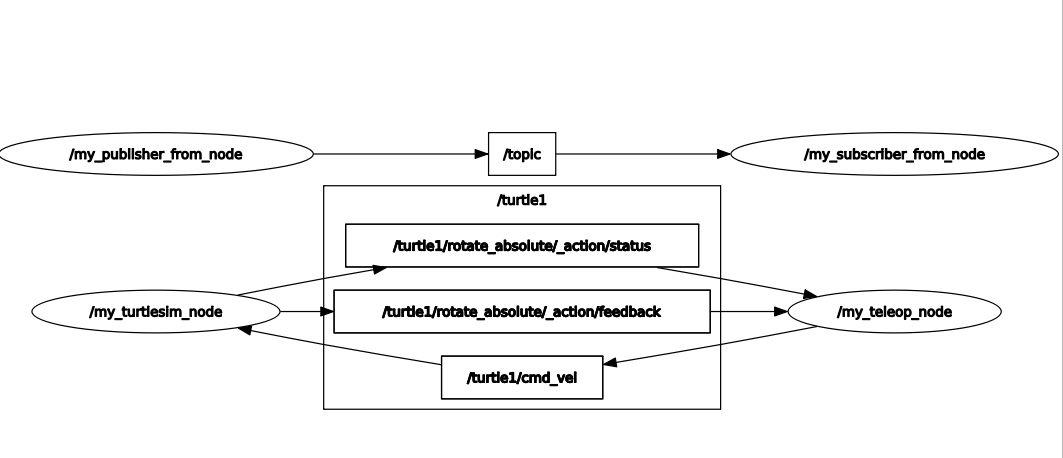
Voluntary exercise
Can you modify the launch file such that it also starts the turtlesim_node and turtle_teleop_key nodes from the previous tutorial? The result should look like this: